Erivelton Gualter
Menu:
Power-Assisted Wheelchair
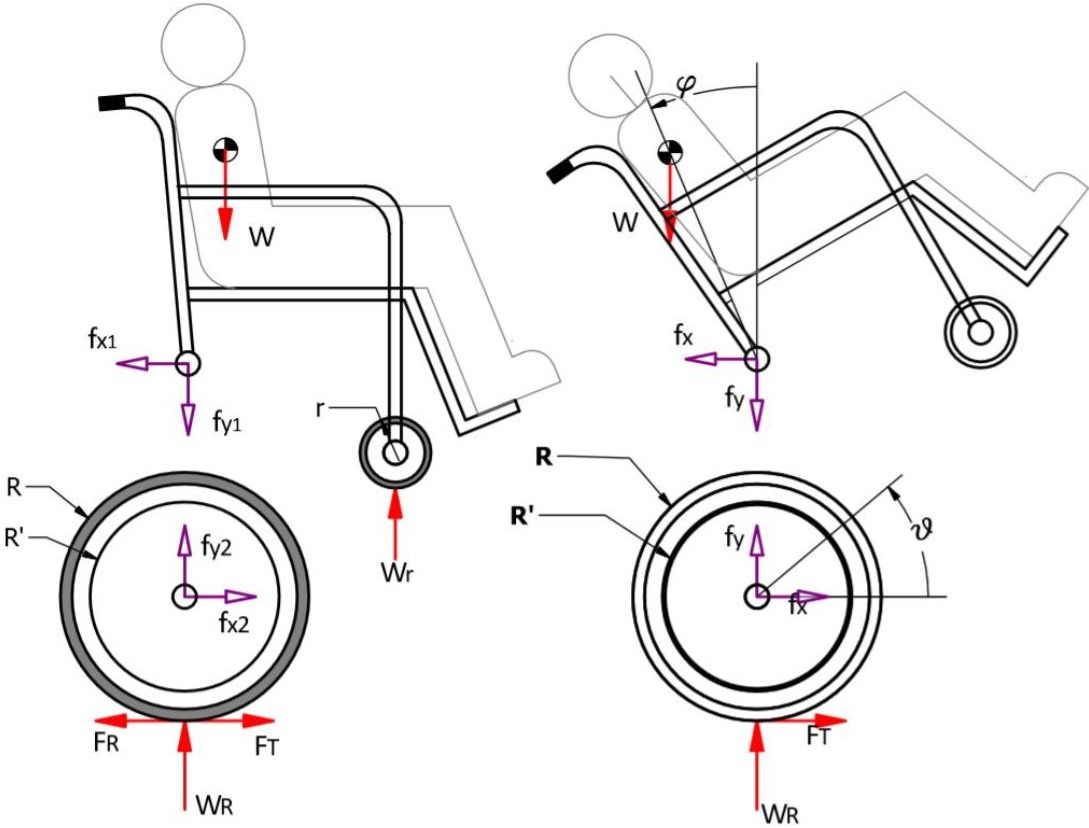
When I went back to Brazil from Western Michigan University – USA, I joined a research with Professor Marko Ackermann. The main goal of the research is to model and simulate a power-assisted wheelchair to accomplish the maneuver called wheelie, where the wheelchair employed is to overcome obstacles and descend ramps.
For this task, I conducted several experiments to estimate the real parameters of the system. The controller of the wheelchair was designed in the Matlab and was inspired the control law. The next step is to manufacture a power-assisted wheelchair.
Publications:
Santos, E. G. et. al., “Optimal Control of the Wheelchair Wheelie.” IASTED -International Conference on Modelling, Simulation and Identification (MSI 2016).
Santos, E. G.. MODELAGEM E SIMULAÇÃO DO WHEELIE EM CADEIRAS DE RODAS HÍBRIDAS. 2016.
Undergraduate research symposium:
Santos, E. G.; Ackermann, Marko . MODELAGEM E SIMULAÇÃO DO WHEELIE EM CADEIRAS DE RODAS HÍBRIDAS. SICFEI - II Simpósio de Iniciação Científica, Didática e de Ações Sociais de Extensão da FEI, 2012, São Bernardo do Campo.
Santos, E. G.; Ackermann, Marko . CONTROLE ÓTIMO PARA EXECUÇÃO DO WHEELIE EM CADEIRA DE RODAS HÍBRIDAS. Simpósio Internacional de Iniciação Científica e Tecnológica da USP – SIICUSP 24.