
Erivelton Gualter
Menu:
VEX Robotics
The first contact with hands on activities that I experienced in college was in the class EL3120 – Laboratory Automation Engineering I in 2011. The class consists in assembling a robot to realize the task of carrying a can to its specific place. It was two kinds of can, one red and the other blue. To accomplish this task, the robot could follow the line to help it achieve the place.
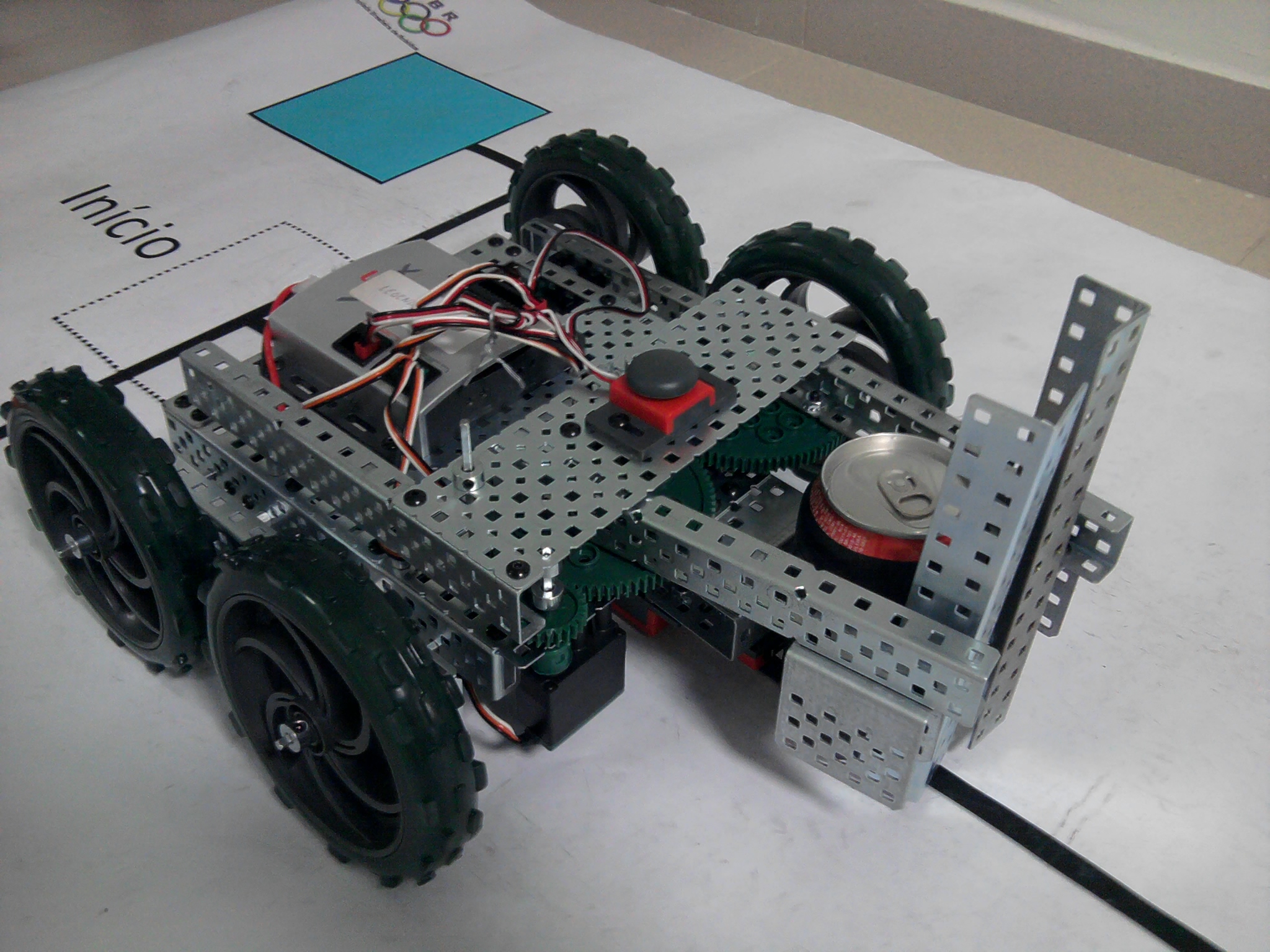
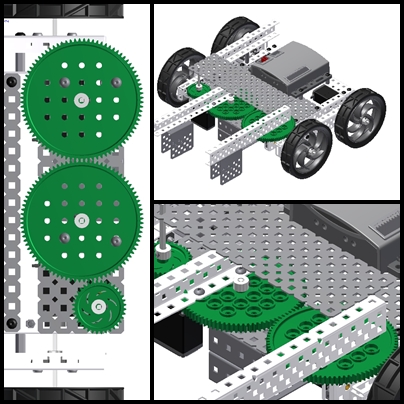
The robot our group made consists in five motors: four motors for each wheel and the other one was used to open and release the grip. In addition, we used an ultrasonic sensor to detect the can, light sensor to detect the mark on the floor and the color of the can. We used gears to increase the torque to be able to lift the can.
Unfortunately, I do not have videos of the robot accomplishing the task, however, our group was the only one to correctly accomplish the task.