
About Me
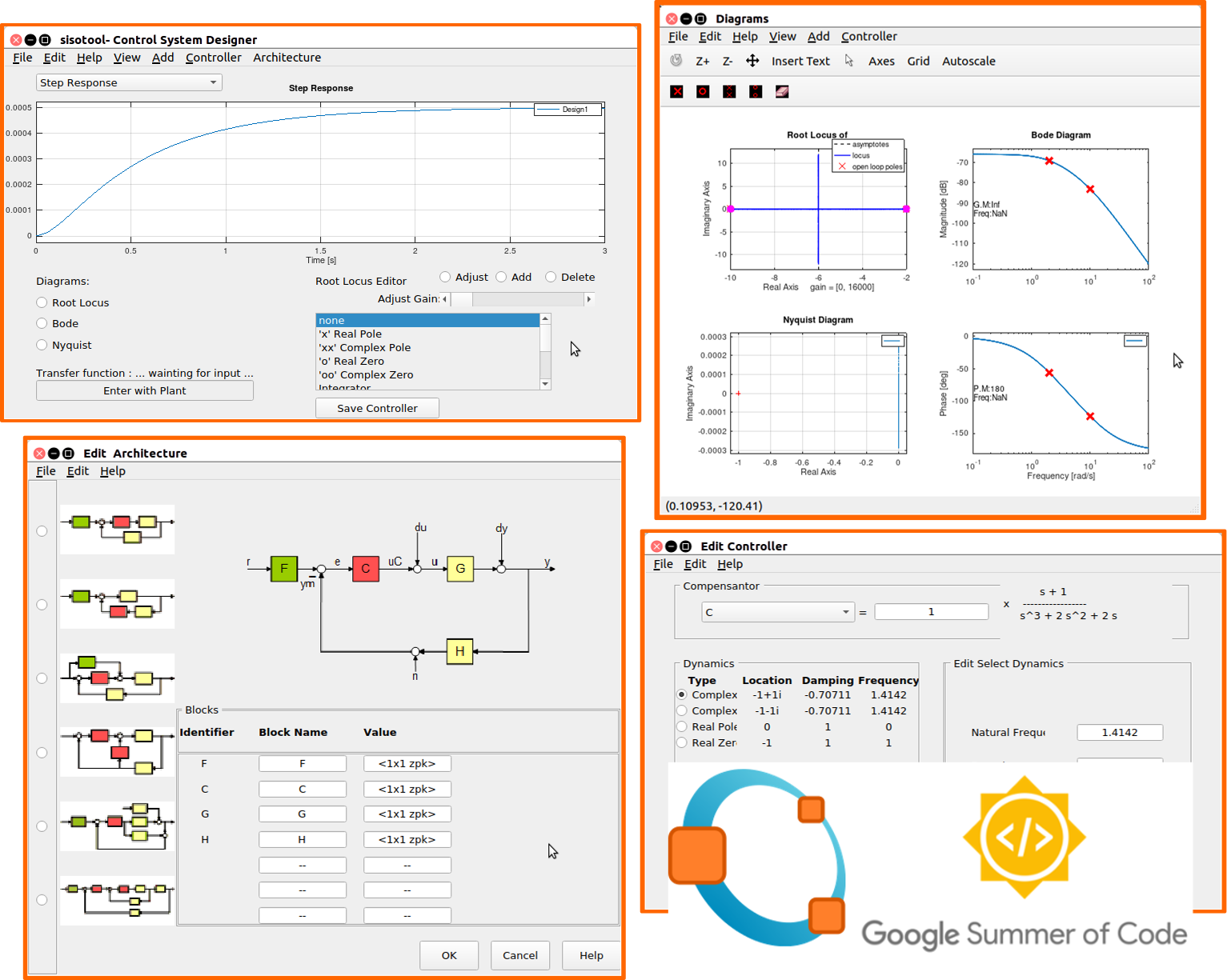
My name is Erivelton Gualter dos Santos. I am doctoral student at Cleveland State University. I am currently a graduate research assistant in the Control, Robotics and Mechatronics Laboratory and I have been developing a new novel actuation mechanism with controllable stiffness and energy regeneration for prosthetic and exoskeleton application. As a briefly introduction about myself, I am an enthusiastic Automation and Control Engineer graduated from FEI University in São Paulo, Brazil. I have also studied at Western Michigan University in Kalamazoo for three semesters. I have been working in the Robotic and Artificial Intelligence Laboratory at FEI for 2 years programming robots to play soccer. My main tasks where relating to software development and mechanical and eletronic maintanance of robots. My last research project was related in studying ways to improve the life quality of disabled people through the improvement of power-assisted wheelchairs. My last internship experience was in the Google Summer of Code where I had the opportunity to develop a Interactive Tool for Single Input Single Output (SISO) Linear Control System Design tool for GNU Octave, also known as sisotool.
What I do
I want to improve the life quality of disabled people through Robotics applications.
Computer Science, Electronics, Machining, Assembly, Mechatronics.
Software Proficiencies
-
Autodesk Inventor; Autodesk Autocad 2D/3D
-
Linux and Windows operating systems
-
Latex, LibreOffice, Microsoft Office
Code Skills
-
Matlab/Simulink and Octave
-
C/C++
-
Python
-
VHDL
-
HTML5
Working History
Graduate Research Assistant - CSU
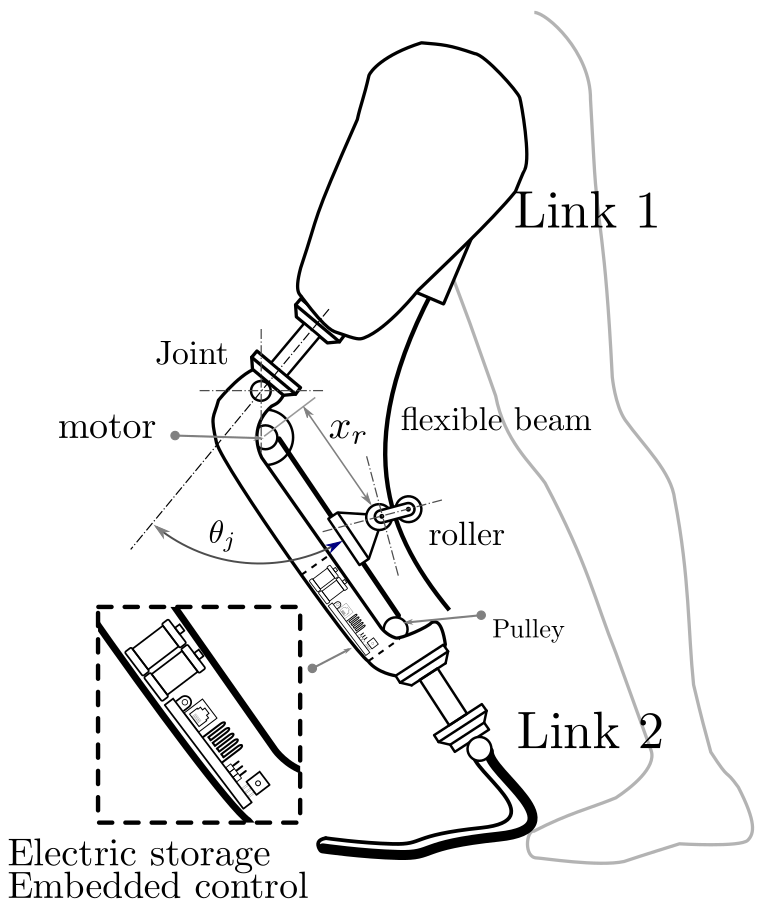
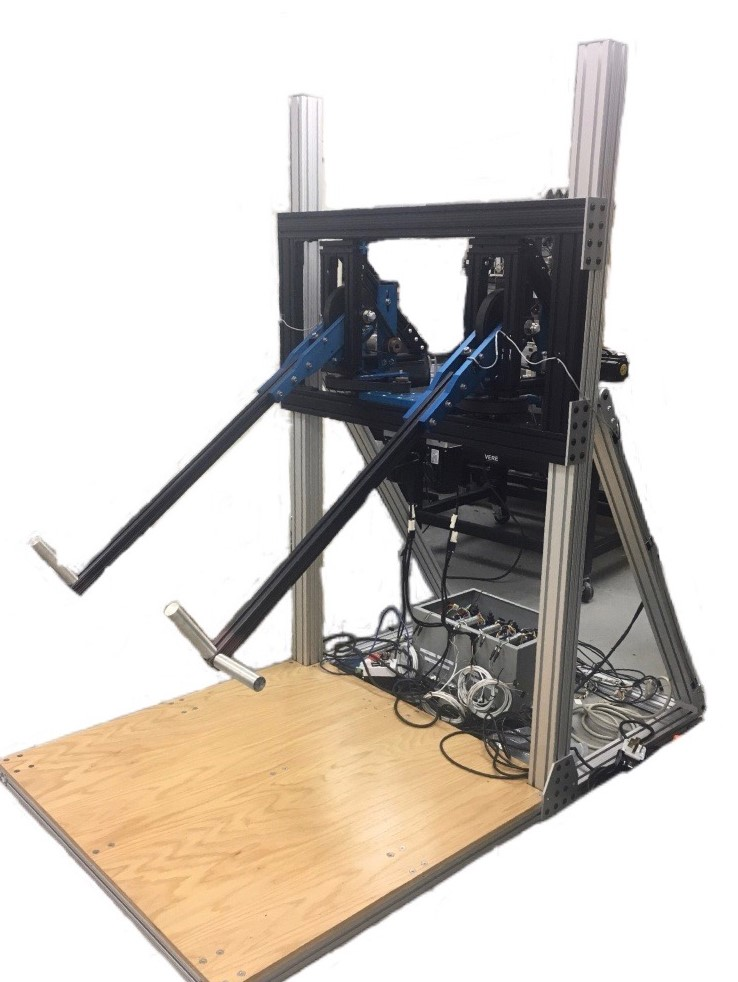
2017 - presentEnergy regeneration in robotics, application to prosthetic legs and exoskeleton.
- Student Developer - Google Summer of Code
Apr 2018 - Jun 2019
Developed an Interactive Tool for Single Input Single Output (SISO) Linear Control System Design for GNU Octave, also known as sisotool in Matlab.
Application Engineer - Vtech Consulting.
Jan 2017 - Mar 2017Providing support and training to GOM robotic products, such as automated Metrology Sensors and Deformation Analyses Sensor.
Education History
Cleveland State University
2017 - presentPhD student at Mechanical Engineering Department.
Aread of Study: Energy regeneration in robotics, application to Variable Stiffness Acuators.
FEI University
2011 - 2016Bachelor's Degree in Automation and Control Engineer.
Outstanding Bachelor Award. (1st of Class 2016). Class List. , Undergraduate Projects, Senior Project.Western Michigan University
Sep 2013 - Dec 2014Study Abroad, B.S., Electrical/Mechanical Engineering.
Interview for WMU International News and Independent Study Project.
Awards
- Prouni Scholarship at FEI University 2010 - 2016
Scholarship Science without Borders
Western Michigan University, 2013 - 20142nd placed - Olympiad of knowledge– 2009
Team Awards
- 1st Place in SmallSize league - Brazilian Robotic Competition 2013.
- 1st Place in SmallSize league - Latin American IEEE Robotics Competition 2012.
- 1st Place in SmallSize league - Brazilian Robotic Competition 2011.
Certifications/MOOC

University of Pennsylvania
Check here the certificate and course description.
University of Pennsylvania
Check here the certificate and course description.
Check here the certificate and course description.

University of California, Irvine
Check here the certificate and course description.

Universitat Politècnica de València
Check here the certificate and course description.
University of California, Irvine
Check here the certificate and course description.

Univeristy of Michigan
Check here the certificate and course description.
Publications
-
Santos, EG. and Richter, H., “Design and Analysis of Novel Actuation Mechanism with Controllable Stiffness.” Actuators. Vol. 8. No. 1. Multidisciplinary Digital Publishing Institute, 2019
-
Santos, EG. and Richter, H., “Modeling and Control of a Novel Variable-Stiffness Regenerative Actuator.” ASME 2018 Dynamic Systems and Control Conference. American Society of Mechanical Engineers, 2018.
-
Santos, EG. et. al., “Optimal Control of the Wheelchair Wheelie.” IASTED -International Conference on Modelling, Simulation and Identification (MSI 2016).
- RoboFEI 2013 Team Description Paper. Eindhoven - Netherlands, 2013.
- RoboFEI 2012 Team Description Paper. Mexico City - Mexico, 2012.
-
Santos, EG.. MODELAGEM E SIMULAÇÃO DO WHEELIE EM CADEIRAS DE RODAS HÍBRIDAS. 2016.
-
Santos, EG.. SISTEMA DE PASSE PARA O FUTEBOL DE ROBÔS. 2013.
-
Santos, EG.; Ackermann, Marko . MODELAGEM E SIMULAÇÃO DO WHEELIE EM CADEIRAS DE RODAS HÍBRIDAS. SICFEI - IV Simpósio de Iniciação Científica, Didática e de Ações Sociais de Extensão da FEI, 2016, São Bernardo do Campo.
-
Santos, EG.; Ackermann, Marko . CONTROLE ÓTIMO PARA EXECUÇÃO DO WHEELIE EM CADEIRA DE RODAS HÍBRIDAS. Simpósio Internacional de Iniciação Científica e Tecnológica da USP – SIICUSP 24.
-
Santos, EG.; Tonidandel, Flavio . SISTEMA DE PASSE PARA O FUTEBOL DE ROBÔS. II Simpósio de Pesquisa do ABC (SPABC), 2012, São Bernardo do Campo. Simpósio de Pesquisa do ABC, 2012.
-
Santos, EG.; Tonidandel, Flavio . SISTEMA DE PASSE PARA O FUTEBOL DE ROBÔS. 14º SIMPÓSIO DE INICIAÇÃO CIENTÍFICA E TECNOLÓGICA (SICT-2012), 2012.
-
Santos, EG.; Tonidandel, Flavio . SISTEMA DE PASSE PARA O FUTEBOL DE ROBÔS. SICFEI - II Simpósio de Iniciação Científica, 2012
Journal Publications
Peer Reviewed Conference Proceedings
Team Description papers
Undergraduate Thesis (Portuguese)
Undergraduate Research Symposium (Portuguese):
Portfolio


Contact Informations
- Address: Cleveland State University, Washkewicz College of Engineering. 2121 Euclid Ave, Room 121, Cleveland, OH 44115
- Phone: +1 216 466-3989
- E-mail: erivelton.gualter@gmail.com
- Skype: erivelton.gualter_2
Coursera
Check here the certificate and course description.