Robot Soccer
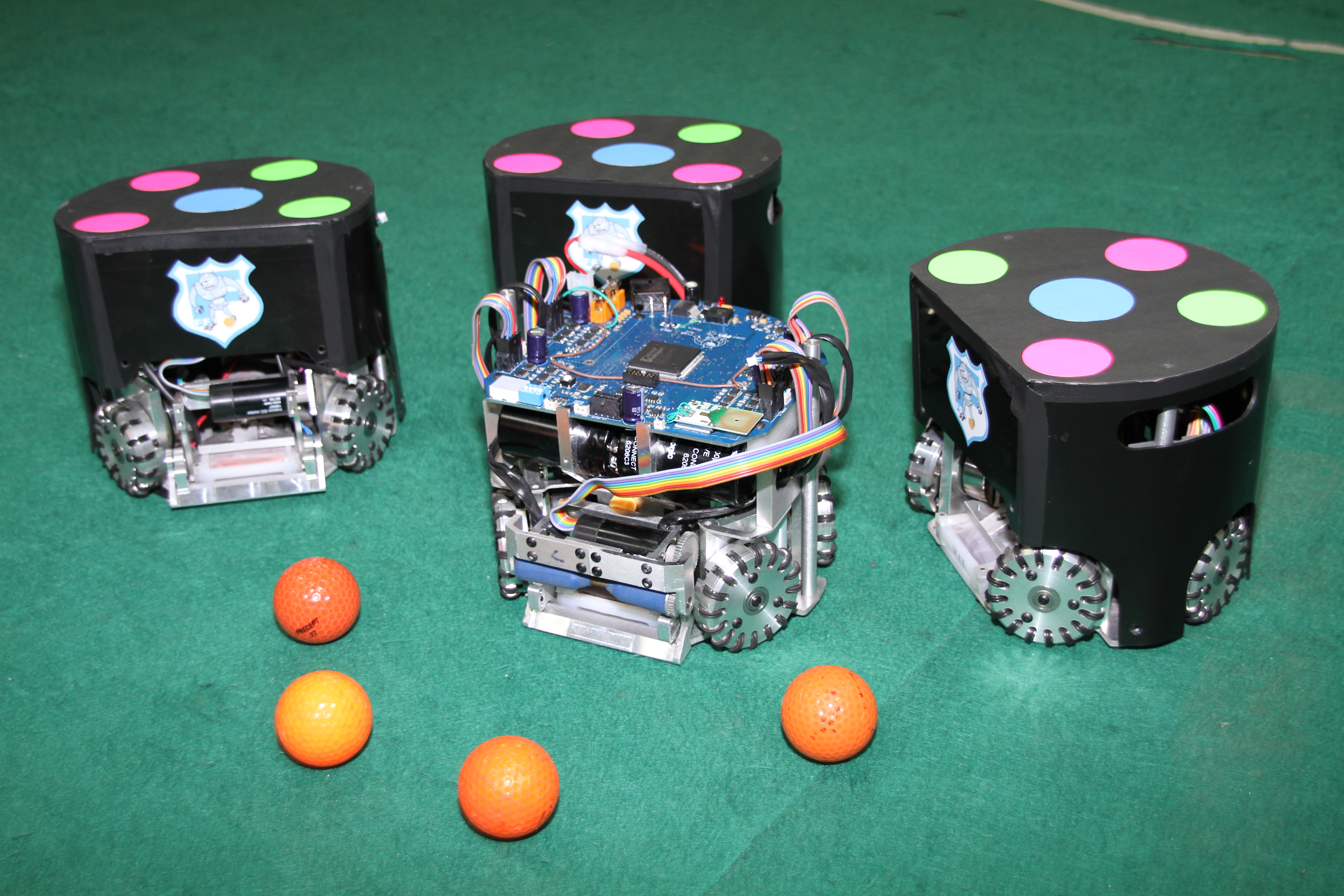
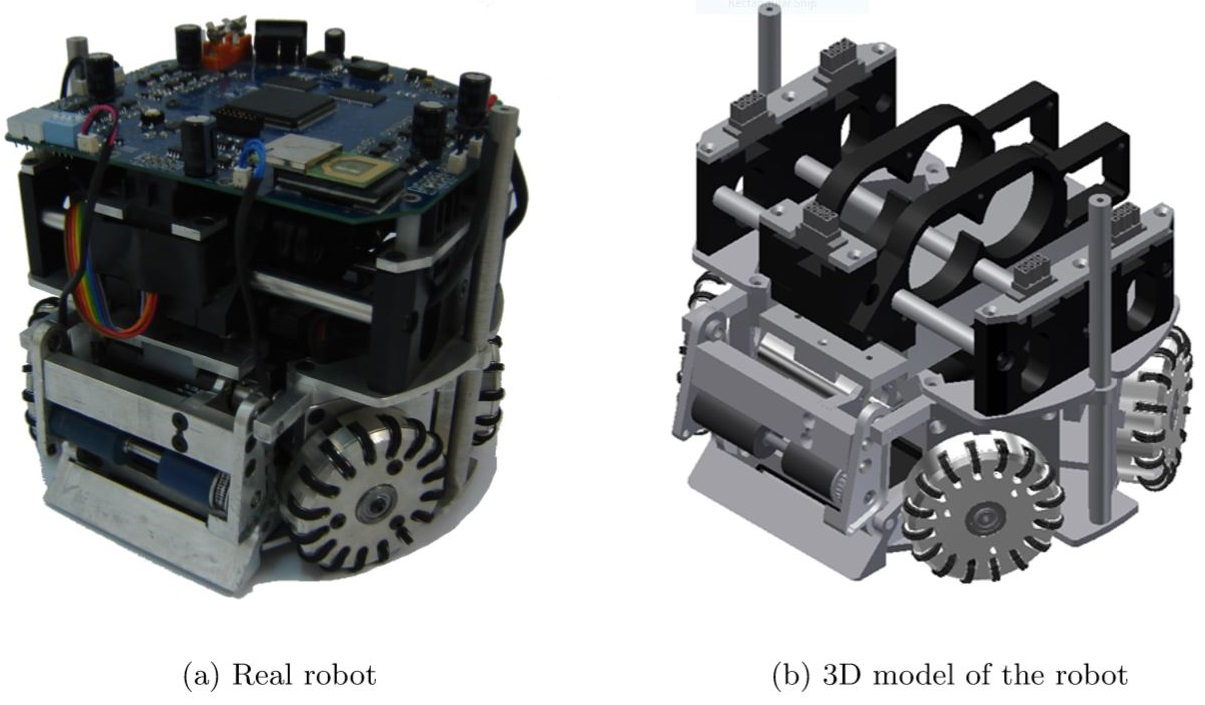
The main goal of this project was to develop robots able to play soccer in a competition with multi-agent system. There are three main competitions: Brazilian Robotics Competition, Latin American Robotics Competition and RoboCup. The robot soccer game is composed of two teams of six robots each and an orange golf ball. There are two cameras to provide the position and orientation of the objects on the field. The robots autonomously decide what to do, which position to go, and what trajectory it should follow.
For the most time during this research, I developed the strategy in C++ language programming. First of all, I spent some time learning the structure of the software. Then, I fixed some basic main function, as some issues in the trigonometry library. Working in this project, I could learn and specialize in the object-oriented programming and data structure. I could apply the knowledge I gained in other task to improve the pass system of the ball, choosing the intensity of force to kick the ball and selecting the best player to pass the ball.
Skills Developed
- Object Oriented Programming in C++;
- Experimental Design;
- Robotics.
Competitions that I participated
World Competitions
- 2013 - RoboCup World Cup - Eindhoven, Netherlands - Top 12
- 2012 - RoboCup World Cup - Mexico City, Mexico - Top 8
- 2013 - Brazilian Robotics Competition - Winner
- 2012 - Latin American & Brazilian Robotics Competitions - Winner
- 2011 - Brazilian Robotics Competition - Winner
Local Competitions
Publications
Team Description papers
Research Report
Videos
Images