MCE 747 - Robot Dynamics and Control
In this class, I learned robotics concepts and analytical tools to control robotic manipulator systems, with strong emphasis on dynamics and control:
- PD;
- Inverse Dynamics;
- Passivity and Adaptation; and
- Impedance/interaction control .
Motion Control Techniques:
For midterm evaluation, a laser beam source has been attached to one side of the wrist in order to demonstrate the possibility of zero Cartesian velocity for a given point with nonzero joint velocities.
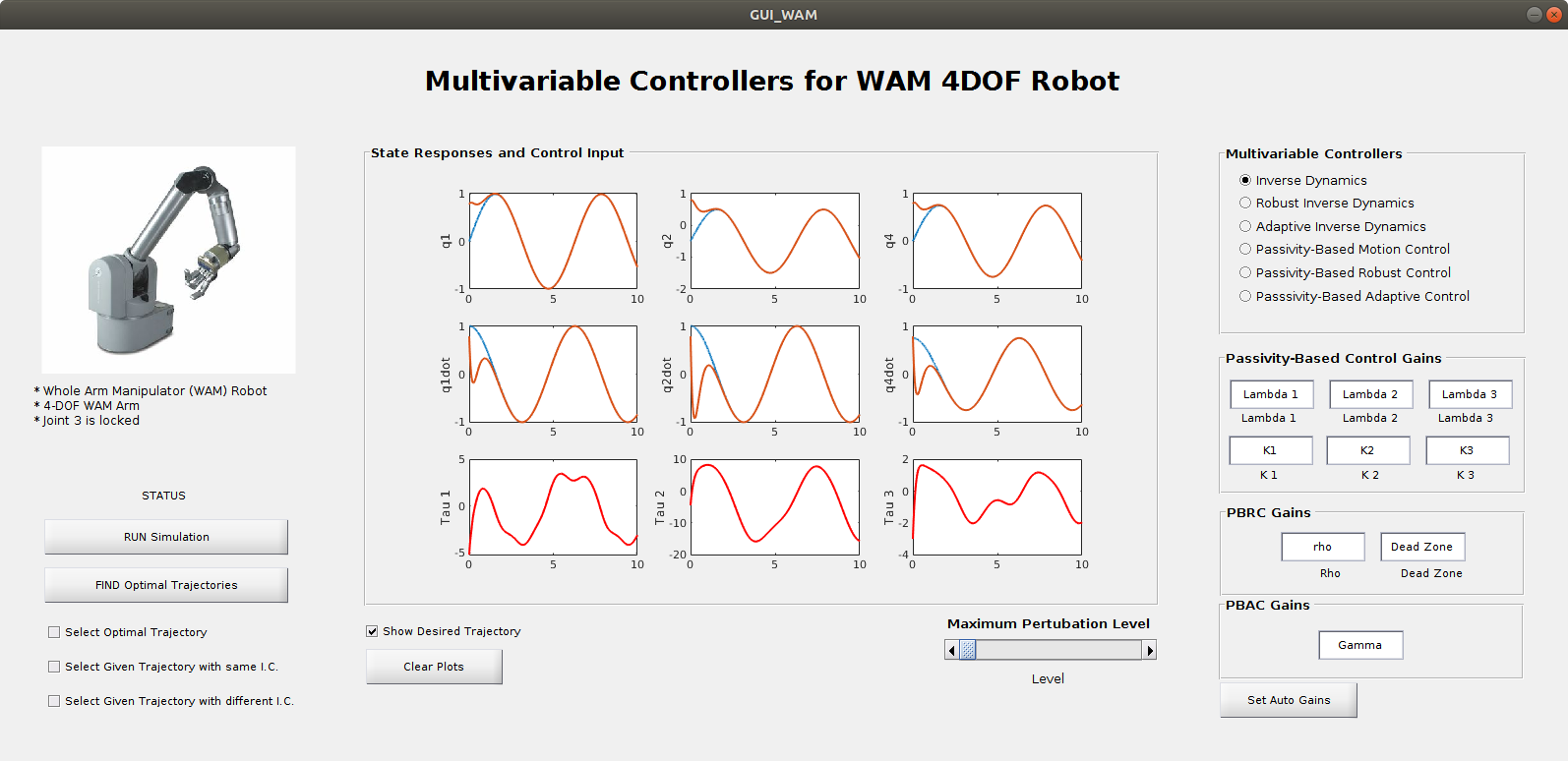
For the first step of final projet was to find optimal reference trajectories for best system identification task. Additionally, I created a Graphical User Interface for the WAM Manipulator to test all the Control Techniques learned in class.